So many new features! The little things like 45 degree crosshairs, dynamic animation of overlapping lines, indication when bumping up against a selection filter - truly great polish. Board variants, propagation delay profiles, groups - the future is here! I hope KiCad is the next Blender-grade success story in OSS. It is certainly poised to disrupt commercial options.
This is going to get crazy as soon as companies start to assert their control over open source code bases (rather than merely proprietary code bases) to attempt to overturn policies like this and normalize machine-generated contributions.
OSS contribution by these "emulated humans" is sure to lever into a very good economic position for compute providers and entities that are able to manage them (because they are inexpensive relative to humans, and are easier to close a continuous improvement loop on, including by training on PR interactions). I hope most experienced developers are skeptical of the sustainability of running wild with these "emulated humans" (evaporation of entry level jobs etc), but it is only a matter of time before the shareholder's whip cracks and human developers can no longer hold the line. It will result in forks of traditional projects that are not friendly to machine-generated contributions. These forks will diverge so rapidly from upstream that there will be no way to keep up. I think this is what happened with Reticulum. [1]
When assurance is needed that the resulting software is safe (e.g. defense/safety/nuclear/aero industries), the cost of consuming these code bases will be giant, and is largely an externalized cost of the reduction in labor costs, by way of the reduced probability of high quality software. Unfortunately, by this time, the aforementioned assertions of control will have cleared the path, and the standard will be reduced for all.
Hold the line, friends... Like one commenter on the GitHub issue said, helping to train these "emulated humans" literally moves carbon from the earth to the air. [2]
The physics of magnetic torquing maybe could probably work in most if not all locations on Earth for a sufficiently small and power dense vertical top that spins sufficiently slow. Want the smallest possible local dot product of gravity vector and magnetic field for an ordinary top (without considering "sideways" tops), which may lead to better performance in some locations on Earth (could map this with e.g. IGRF). 3D field actuation would be beneficial to allow higher efficiency and longer periods of actuation around the window where the Earth's magnetic field is maximized in the spun plane, while minimizing imbalance: this actuation timing is probably the only strategy that would make practical sense for most of the magnetic power, because you will need to take a break once in a while for sensing. Another practically difficult part would be avoiding on-board soft iron noise in magnetic field, because higher spin speed would require the device and environment to damp out the device-induced magnetic field at a higher minimum rate to afford any budget for accurate sensing of the background field during the "off"-time. That is: sensing trades with spin speed because it takes non-zero time and requires a stable environment.
To implement this, I think you'd first want to test in a controlled environment with a larger magnetic field and then gradually turn down the applied field until it is Earth-like. I am honestly unsure whether you could practically get there, so earlier I used the words "maybe could", but humans are crazy so I appended the "probably".
I'd love to read this paper! This was on my mind when I was GNC lead for an undergraduate project at Michigan Tech (Oculus-ASR - Nanosat-6 winner). We had a combined controller for reaction wheels and magtorque rods.
PDFs are just a table of objects and tree of references to those objects; probably, prior versions of the document were expressed in objects with no references or something like that.
There needs to be better tooling for inspecting PDF documents. Right now, my needs are met by using `qpdf` to export QDF [1], but it is just begging for a GUI to wrap around it...
Take a look at the REMNux reverse engineering page for PDF documents (https://docs.remnux.org/discover-the-tools/analyze+documents...). Lots of tools here for looking at malicious PDFs that can be used to inspect/understand even non-malicious documents.
If you are talking about having the copyrighted source code not be used to train an AI, you could look at the discussions surrounding a recent license change in the Reticulum project [1].
I had previously been curious about this, and made a post on HN that got limited attention [2], but if you are wanting your software to not be used to create training data for third-party models, it could be a little relevant.
It’s an interesting idea, but not open source, and IMO not particularly useful. It says the software can’t be used to harm humans. Folks, this is why philosophy is a required course. What does it mean to harm someone? Is using it to help someone get an abortion harmful? Is using it to make a self-defense weapon harmful? Is using it to automate a beer brewery harmful? Yes, if you’re anti-abortion, a pacifist, or a tea-totaler. No, if you’re not.
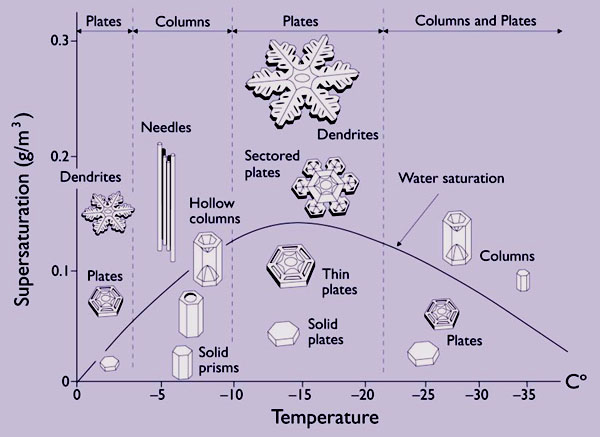
This reminds me of the following, a story from my personal life. My wife and I both ski, and early in our relationship one of us told the other about the coolest poster ever about snowflakes. We each described it. We were sure we were talking about the same one - the one that graphed how snow changes over temperature and helped explain why it can feel so different. One of us pulled it up, and we realized, well...
She was talking about #1 (the work of Bentley made into a collage), and I was talking about #2. It turned out to be a pretty good way of thinking about how imperfect communication is, and how hard it is to get on the same page about things that are even more important when all we have is words.
{kind=link}
{kind=link}